")
Building the CC-01 chassis
This chassis was made for two distinct kind of usage: one that I would call Rally-Raid, with a pretty good top speed like on a real Paris-Dakar. The second usage is scale trailing where the goal is to slowly drive off-road and to clear obstacles in the most realistic manner. My model will be dedicated to this last usage, thus the following build that will sometimes be optimized for this usage (out of the box, the CC-01 is Rally-Raid oriented).
So we begin the build by assembling the front differential that will be locked. Here, the goal is to get the best possible traction not to get stuck. With a "normally built" differential (also called open differential), the power is constantly and equally split between the two wheels of a drivetrain, but the wheels can turn at different speeds (in corners for example). But whenever a wheel totally losses grip (let's say it doesn't touch the ground), then 100% of the power is transferred to the wheel of the drivetrain that offers the lesser resistance (in this example, the wheel that doesn't touch the ground). You can make the test with any model, either 2 or 4WD: place the model in lateral balance on 2 wheels (only 1 front wheel and 1 rear wheel touch the ground). Switch on and give a smooth throttle: the car doesn't move because all the power is transferred to the wheel(s) off the ground.
On the contrary, when the differential is locked, both wheels of a drivetrain always turn at the same speed: whenever a wheel lacks grip (or isn't in contact with the ground), the other wheel will keep rotating and pulling the vehicle.
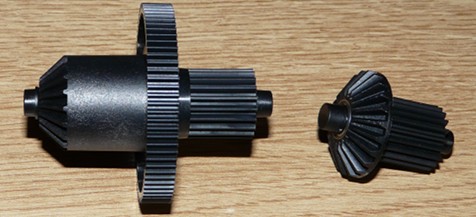
Open differential

Locked differential

On the left, the classic built of a Tamiya bevel gear differential, on the right, the same differential when locked. To lock the differential, place 2 of the 3 bevel gears in their natural position, then place the third bevel gear in between the two others. Once closed, the differential is locked since the bevel gears are in contact. Please note you will have to force a little bit on the bevel gears to perfectly place them at the bottom of the gear case. Another solution is to use the G parts (the same as for the rear differential) by ordering an additional G tree reference 9005422.
Locking the differential is interesting for trail usage because you usually run on slippery or very low grip surfaces: however, the steering loses a lot of efficiency. To give you a more precise idea, a locked front differential will transform your model into a brick with very poor steering angle. This is a necessary compromise when trailing because traction is crucial on slippery surfaces.
Next step: assembling the gears.
Spur and counter gears
With the differential in the chassis
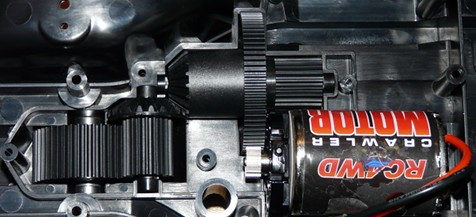
I assembled the spur and counter gears, as well as the differential with ball bearings. On the second photo, you can also see the motor and its pinion. It is time for a brief advice: the position of the motor pinion on the motor axle is very important. The spur gear has a normal "travel" in its housing, but under torque load, it can move back or forward a little bit, modifying it position compared to the motor pinion. When the spur gear is at its most back position, the motor pinion grub screw can hit the spur gear teeth, making it wear very rapidly. So you need to pay attention when positioning the pinion onto the motor axle and to pay attention the grub screw is firmly tight.
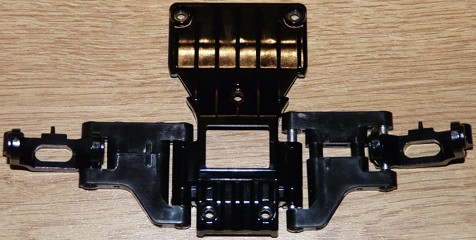
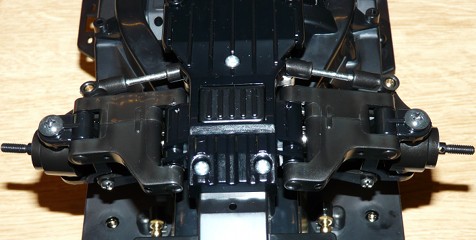
Next is the assembly of the drive gear, the front damper mounts, the central driveshaft and the rear drivetrain links:
The drive gear and damper mounts

4-Link and driveshaft

The biggest change compared to the stock assembly is the use of the GPM 4-Link in replacement of Tamiya's plastic units. These are pretty soft and get softer at usage, leading to breaks at the rear dampers mounts on the rear axle. Moreover, the GPM 4-Link offers a significant increase of the rear ground clearance because the upper links are fixed more at the center of the rear axle (so the side movement is increased).
Now let's go for the front drivetrain assembly:
Front drivetrain
Assembled on the chassis
Nothing difficult here: the CVDs replace the stock shafts in order to reduce play. However, the steering system looks already assembled (which is true), but here are more details about it:
Upper part
Lower part
Updated On this chassis, the steering system is made of two parts: in the bathtub, the link to the steering servo goes through the chassis to be connected to the uprights links. It works like a pivot going through the chassis to transfer the servo movements to the uprights. The GPM kit is entirely in aluminum and features ball bearings: compared to the stock steering system, it is more rigid, which reduces play, especially when using a high torque servo. Here, it is important to put a drop of thread lock on every screw and ball connector of the steering system (except the screw that goes into the chassis plastic: the thread lock makes the plastic very fragile).
The work on the front drivetrain is almost finished. We now go for the rear drivetrain, and more specifically the assembly of the rear axle and its differential we are also going to lock to gain traction:
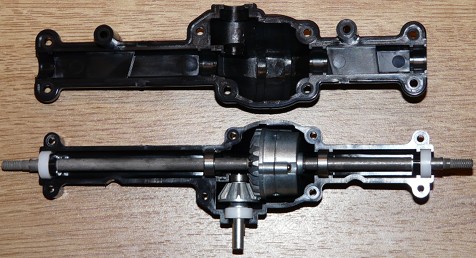
Rear differential parts

Locking the rear differential

From the beginning, Tamiya offered the possibility to lock the rear differential, including by supplying the parts and manual instructions to do so. Here, the first photo shows all the parts needed to assembled a locked differential, and the second photo shows the result. As a matter of fact, the two black G parts are the blockers: they replace the usual bevel gears and lock the large bevel gears.
Updated Next is the rear axle assembly:
Wheel axles and differential

Rear axle assembly
In case this rear axle makes you think to the Madbull's or the Hornet's, this is normal: all three are rear solid axles. Main differences are the lockable differential and the central driveshaft joint. I guess you wouldn't miss the plastic bearings yet you know I always replace them with true ball bearings. At first, I had decided to leave a few plastic bearings, everywhere they would be directly exposed to "outside elements": uprights, rear axle joints and drive gear joint. The plastic bearings do not jam or rust, unlike ball bearings. In the end, I changed my mind while processing the build and I replaced every plastic bearing: I guess I will know whether I was right or wrong after a few runs.
Let's go for the assembly of the main driveshaft, the 4-Link and the rear dampers:
Wheel axles and differential

Rear axle assembly

As for the main driveshaft, I also recommend to use thread lock to tight the screws. On the first photo you can also see that Tamiya had anticipated the longer wheelbase. The two upper links are fixed to the most interior mounts and pass over a second pair or mounts which are closer to the rear of the chassis. This is how the chassis can change from 242mm to 267mm wheelbase (or 252mm with spacers) to host the different bodyshells of the series. Note that you need a longer central driveshaft for the longer wheelbase.
As for the kit dampers, they are the hydraulic type and you should build them as soft as possible. At the front, I did as per the manual, but I didn't use the pretension spacers for the rear units. In addition, I used orange oil (300 grade) instead of the kit-supplied yellow oil (400 grade). You can also notice the GPM damper mounts: this is a weak point on the stock model since the dampers do stress the plastic because they are directly mounted onto the rear axle. Apart form the more resistant aluminum and the possibility to set the damper height, the GPM system serve as damper mounts and also reinforce the 4-Link anchor. Anyway, this option is required to mount the 4-Link and it is highly recommended to make this part of the chassis more reliable.
Now placing electronics into the chassis:
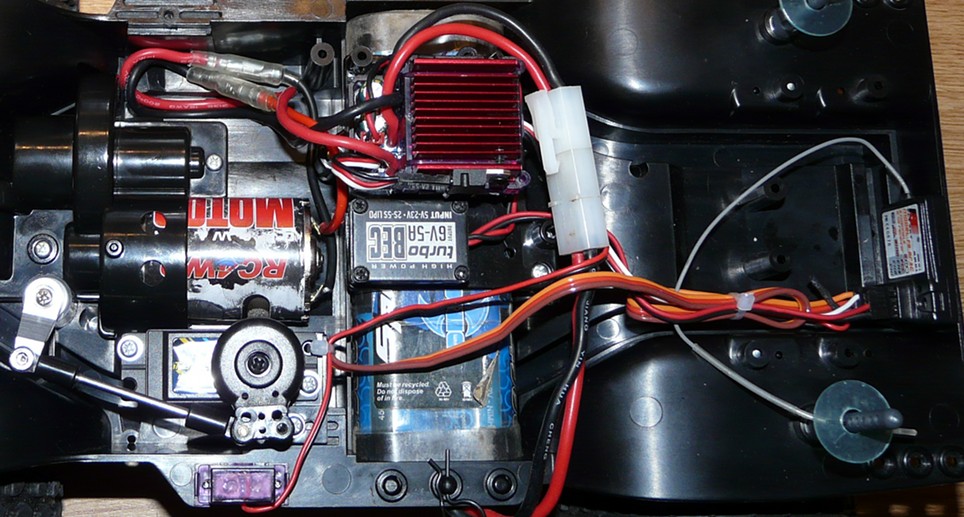
In the LandFreeder case (this also applies to the Unimog), the rear of the bodyshell is a flat bed, unlike all other models of the series having high rear ends. Placement of the electronics needs to comply with this characteristic: they will mostly be placed onto the platform above the battery pack, apart from the receiver I chose to place at the rear of the chassis.
Aside from the ESC, you can see an additional component wearing the "Turbo BEC 6V-5A" writing. It is supplied with the ESC and provides a continuous and regular voltage to the receiver and the steering servo, whatever the load on the motor says the manufacturer. The BEC function is precisely that, including when it is directly integrated into the ESC: however, in the crawler and trail categories, you need steering servos with more torque but these drain more electric power than standard servos. Hence the need for a more powerful power supply unit.
Despite the wheel arches on the chassis bathtub, you can't avoid projections to reach the inside of the chassis, thus the electronics. Moreover, the bodyshells usually serve to spread the projections all over the chassis, especially liquid projections like water and mud. So the goal is to protect the electronics, not to make the chassis turn into a submarine:


Here, I used a plastic box found in the kitchen: anything in plastic would suit perfectly, as long as the size fits (especially height). I made a cut on one side of the box and cut a small hole at the top (which is near the bottom of the box). Then, insert the battery connector cables to the top by gently splitting the cut you made (the hole at the top was made too small for the plug, but big enough to comfortably leave room for the cables). Just add scotch bands to fix the cut on the side of the box so the box keeps its shape. Now just cover your ESC with the box: by chance, mine perfectly fits so it stays there without the need to hold it. If the box needs to be held, you can count on several holes that will help you secure it.
As you can see, this is not watertight since the goal was only to protect the ESC form direct projections and drops leaking from the inner bodyshell. Fully waterproofing leads to two main issues: electronics heat dissipation and the risk to sink the electronics in case of a leak (in this case, the protection turns into a container). In addition to the electronics, plugs are also an issue, as well as the battery pack itself. Of course, everything is possible, but since my model will not serve to explore Nemo's world, I decided to keep with a simple protection system.
Update Very soon, I faced important heat problems and a persistent lack of power with the RC4WD motor. This motor is definitely not a reference, but it was not the unique cause of the problem.