")
Main transmitter functions explained
I am going to use a transmitter that I know pretty well as a basis for this explanation. I own several of them to control my models and this same transmitter is available in different flavors from different manufacturers:
Flysky FS-GT3B

Hobbyking HK-GT3B

R2Hobbies Eurgle

Same transmitter, more or less model memory slots, with or without a display screen, but always the same receiver and the same functions. These functions will be explained: the exact same functions can be found in every transmitter, whatever the brand (even several years-old units). Sometimes, some functions may be called differently because of the amazing work of whatever "marketing engineer", but the fact is that whatever the name, the function will always act the same. On very basic transmitters, only the REV and TRIM functions will be available: it is now somewhat difficult to recommend so basic units since the price difference with more featured ones is very small (about 10€). Besides, many modern units feature memory slots to store individual setups for several models: extremely useful when you own more than one model to control, but also cheaper since you only need to buy an additional receiver (and to bind it to the transmitter) to control an additional model with your existing transmitter.
Functions are listed in what I believe is the most logical sequence, that is the sequence you will most likely follow whenever you build a model. Depending on transmitters, the channel 1 may be called ST (Steering) and channel 2 may be TH (Throttle): anyway, channel 1 is always steering and channel 2 is throttle.
 REV
REV
Function controlling the servo direction: REV for Reverse or NOR for Normal. Depending on how the servo is placed into the chassis, sometimes, the servo response is reversed compared to the command sent from the transmitter. This function allows to correct this whenever it is needed.
Please note this function can be applied to both channels. Generally, channel 2 needs to be set in REV mode for brushless motors.
Important: when using a brushed or brushless electronic controller, never use this function to solve the problem of a model running backwards when you accelerate with the transmitter. Here, the problem needs to be solved by resetting the controller. Otherwise, the brake will be applied backward, not forward (which will make the model go backwards instead of braking: the gears won't appreciate this treatment for long).
TRIM or Sub-T
This function finely adjusts the servo neutral position. When installing the servo-saver on the steering servo head (previously switched on to neutral), you have to respect the grooves of the servo head: most of the time, the grooves make the servo-saver fit in every position but the centered one. The trim function will help you make the necessary adjustment by resetting the servo neutral position. This function can also apply to the throttle servo on channel 2 only when using a mechanical speed controller (or a servo for gas-powered models). In any case, if the wheels spin when the transmitter is in neutral position, you need to reset the speed controller (to setup up the throttle neutral position on the ESC).
EPA or E. Point
End Point Adjustment: by default, this setting is at 100%, meaning it makes the servo work at its full movement capacity both ways. However, depending on the steering architecture, this may be a problem: often, a steering element may hit the chassis and block the steering movement before the servo reaches it own movement limit. The servo can still move further but the wheels have already reached their maximum turning angle. Here, when you order the servo to keep moving until it reaches its own limit, this will force the steering elements that can't travel further. As a consequence, once the steering is at it maximum travel, the servo will keep forcing: the servo saver will absorb the extra movement which will lead to wear and later breakage of the servo and the servo-saver.
Adjusting the end point will tell the transmitter where the servo will stop moving: on the transmitter, the wheel or the stick will still travel to its maximum, but the rotation command sent to the servo will stop before.
Advice: always set the same EPA value for both the right and left directions. The best value will be the one on the side with the most limited travel. When both right and left values are the same, the steering angle will be the same when the model turns right or left.
D/R or D-Rate
Dual Rate: this function is different from the previous one, even if it looks like they have the same result. Consider the EPA as defining the mechanical travel limits for the servo. The Dual Rate has to be considered as the overall steering angle of the model depending on the track layout and driver preferences.
On a track with sharp corners, you need the full steering angle in order to turn sharp (physical limits being set by the EPA setting). But on a fast track with open corners, you do not need the full steering angle of the model, just a percentage of it: setting the Dual Rate will allow you to fully operate the wheel or stick but the model will only turn at 80% of its physical steering angle (for example). Here, the advantage is to get a less sensible steering, thus a greater stability (especially in straight lines).
Personally, I hate high response steering on my models, so I always use the Dual Rate setting that I adapt to each model and each track layout. Others prefer high response steering because they feel it is more precise for cornering. Setting a limited Dual Rate sometimes gives the sensation the steering response is slower: technically, the servo always rotates at the same speed, whatever the D/R setting. However, with a 50% D/R, the movement on the transmitter wheel is only half-applied to the model. It is a question of feeling at the wheel: choose yours.
Let's have a break: this is where I personally put an end at setting my transmitters/models.
I'm not saying the rest of the functions are useless, just that the ones reviewed so far are enough for the vast majority of cases and drivers. In my opinion, the next functions are meant for drivers who need precise custom responses at their driving habits or preferences. Which means that they already perfectly control their models using the first batch of settings and they are looking for fine tuning. I am not there yet in my driving skills, as most drivers I guess. Anyway, it is always interesting to know about features, even if we do not necessarily need them to improve our driving.
EXP or Expo
Exponential: applies to the steering and/or throttle. Here's the theory: at 0% (default setting), orders from the transmitter are linearly applied to the model. When applying 10% of throttle or steering angle (that is 10% of the stick, trigger or wheel travel), the model responds with 10% of throttle or steering angle. When applying 20% on the transmitter, the model responds with 20% of its capacities and so on.
However, you might wish a greater precision at low speed, or the opposite, a greater precision at high speed (this applies the same way to steering). For example, on a low grip surface, a motor with tons of torque will be difficult to control: so you may then prefer low responsiveness at low speed, even if you will loose precision at higher speed once the model is more stable. Here, you would set negative expo on throttle: the result will be that the first 50% of the trigger travel will only command the first 25% of the motor power (for example). However, the remaining 50% of the trigger travel will command the remaining 75% of the motor power (because you always start at 0% to end at 100%).
Same thing with steering: positive expo will make the model extremely responsive close to the neutral position on the wheel whereas negative expo will make the steering "lazy" (more steering wheel movement for less model response).
With graphics :
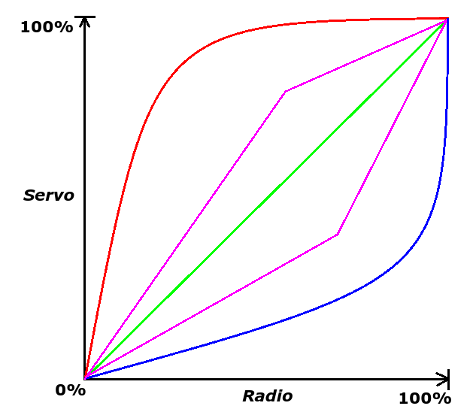
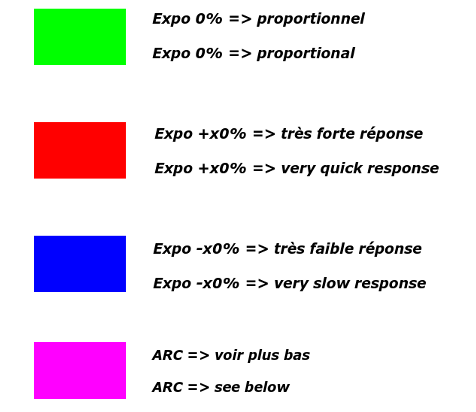
In green, the 0% default expo setting: whatever transmitter command reflects proportionally on the model.
In red, positive expo (a lot): the servo (or ESC) is at 80% of its capacity almost as soon as you touch the commands on the radio. Either you smoke the tires or you turn with hand brake (both can be set so simultaneously since the setting is separately applied to the channels).
In blue, negative expo (a lot too): the servo (or ESC) only reaches 20% of its capacity when you are almost at full on the transmitter. The result is the exact opposite of the previous: you need to turn the wheel a lot for the model to start cornering. On the throttle, the model will always drive very slowly, except when you reach the last 3-4mm of the trigger travel: then it goes wheeling.
Personally, I never use expo, either for steering or throttle. I may be wrong, but I first try to focus my efforts on the previous settings and my driving. By driving, I also mean the part of teaching my fingers to use the transmitter controls: we all start(ed) driving in on/off mode. Then we learned, slowly, to control steering and most important, throttle in order to drive the model less brutally: in my opinion, expo is only meant for drivers who already perfectly control their fingers and wish to adapt the model response to their driving style. I think that if you read this guide, your driving skills have probably not reached a level where expo could improve anything yet.
ARC
Adjustable Rate Control. Yes, doesn't help  . It looks like this function can mainly be found on Sanwa transmitters (or Airtronics, some Kyosho and others): it replaces or is a complement to expo. In fact, it is expo, but with a little difference that justified a name that no one understands.
. It looks like this function can mainly be found on Sanwa transmitters (or Airtronics, some Kyosho and others): it replaces or is a complement to expo. In fact, it is expo, but with a little difference that justified a name that no one understands.
So, ARC is expo, with the difference that the response will be proportional between neutral and the setup value, and then again proportional between the setup value and 100%. This is what I draw with lines in pink on the above graphic. So the conclusion is the same as for expo: good for skilled drivers who need custom settings to better adapt the model response to their driving.
ABS or ALB
ABS is exactly the same as on real cars. ALB means Anti-Lock Braking, which is exactly the same as ABS once the word ABS has gone through Sanwa and a few other manufacturers marketing department.
Anyway, this function must remain deactivated on all electric models. To my knowledge, not a single ESC (brushed or brushless) is compatible with this function that can only operate a servo and brakes (which are found on gas-powered models).
These are the main functions that can be found on the vast majority of transmitters. Of course, more functions may be available on higher end transmitters, but the essential and useful have been listed above. Never forget a transmitter will never improve your model performance: only you and your driving skills will.
What transmitter for my model?
Again, the transmitter does not make the driver. Nowadays, for a new buy, you'd better go for a 2.4GHz unit: technology is there, it is sure and reliable for a cost equal or lower than the most basic crystal transmitters.
Even if you own only one model, go for a transmitter with model memory slots: who knows if you won't have a second model to control one day. Whenever this happens, you will only need one more receiver.
About 2.4GHz receivers: many manufacturers, especially "renown" brands, add electronic "locks" on their radio systems so that only their transmitters can control their receivers and only their receivers can work with their transmitters. Run! Any of these receivers will cost you at least 50€, that is the total price of a complete radio system with extra receivers from less "renown" brands (which often belong to the manufacturer who makes the radio systems for the "renown" brands: the world is smaller than you can imagine). Just ask your friend Google and you'll soon notice that very expensive "renown" radio systems dangerously look the same as much cheaper systems sold under less "renown" brands.
So how do you explain that well featured transmitters including many functions and 10 model memory slots can be found at about 30€ (and about 5€ per extra receiver, which makes 1 transmitter controlling 10 models for less than 80€) when at the same time a "renown" brand sells1 single receiver at 50€? As for the price of their transmitters, count about 100 to 150€ for the same features as the 30€ unit.
Let's speak frankly: quality standards do not reach the same level. The 30€ transmitter will not be outperformed (well, performance for transmitters?) and will not be out of order or break apart in 15 days, but plastics and adjustments will not be always at their best. Also, the transmitter ergonomics, how your hand fits on it, the weight and balance may not be at their best either, but again, nothing crippling here. As for features, you'll find everything you need with a 30€ transmitter, even more than you need for normal use.
Let's be honnest: if Marc Rheinard overlaps you 3 times in a 5 minute race using a 500€ transmitter, he will still overlap you 3 times in 5 minutes with a 30€ transmitters in his hands. In fact, if he overlaps you only 3 times in 5 minutes, you can be proud of your driving .
In conclusion, quality, functions and reliability of a 30€ transmitter are more than enough for the vast majority of us. A nice "renown" brand transmitter at 300€ or more will never make you drive any better. At this price tag however, it'd better be more comfortable to hold, offer more features and work fine at least for 10 years. It is a matter of choice: it is true that some people feel more comfortable when they hold some transmitters, mainly because of ergonomics (the handle, a "left hander mode", how fingers reach the commands) and weight balance. These are considerations that can be important for some people, and some brands have developed renown features to address this. If you can, try to hold several transmitters to evaluate the best one for you, or at least, the ones you feel comfortable with: comfort is important since your attention needs to be focused on controlling your model (so you can "forget" about the transmitter). The most important of all is not the transmitter but the fun to drive your model.