")
Châssis TL-01 : moteur brushless
J'ai souhaité dépasser mes limites actuelles : l'objectif est d'apprendre à maîtriser un modèle qui "pousse fort" de manière à gagner en sérénité une fois que je piloterai des modèles vintage nettement moins puissants. J'aurais bien entendu pu utiliser mon TA-04 TRF puisqu'il est déjà propulsé par un moteur brushless puissant mais je ne voulais pas ruiner mes efforts sur la carrosserie. De plus, les pistes auxquelles je peux accéder dans la région ne sont pas très propres : un châssis aussi ouvert que mon TA-04 TRF n'est donc pas très indiqué. C'est la raison pour laquelle mon choix s'est porté sur ce TL-01.
Pour une motorisation plus puissante que 23 tours, l'idéal est de passer au brushless pour s'épargner l'entretien du moteur. Dès qu'on évoque la question du rapport prix/performance en brushless, une marque s'impose comme une évidente : Hobbywing. Ce fabricant chinois a littéralement révolutionné l'offre du marché avec ses combos EZrun : ce ne sont peut être pas les mieux conçus ou les plus performants, mais leur prix défie toute concurrence. Par exemple, un combo EZrun 13T 3000kv + contrôleur 35A + carte de programmation est à peine plus cher qu'un variateur électronique + moteur Sport Tuned alors que les performances obtenues sont proches (suivant les châssis).
Après quelques recherches, j'ai arrêté mon choix sur le combo EZrun 9T 4300kV avec contrôleur 60A et carte de programmation : selon les avis que j'ai pu lire sur différents forums, les performances devraient se situer autour de celles d'un moteur 18-19T à charbons. Davantage de puissance ne me serait pas utile à la fois du fait des limites du châssis TL-01 et de mes aptitudes de pilote.

Le moteur est un brushless 9T 4300kV couplé à un contrôleur 60A. Pour décortiquer ce charabia, petit retour sur les principes de nommage d'un moteur à charbons :
- 23T indique le nombre de tours du fil sur la bobine : moins il y a de tours, plus le moteur tourne vite et offre de la vitesse de pointe.
- x1, x2 ou x3 après le nombre de tours indique le nombre de fils sur la bobine : plus il y en a, plus le moteur a de couple. On augmente le nombre de fils pour augmenter le couple en sacrifiant un peu de vitesse de pointe.
- un moteur 10x2 a donc 2 fils faisant 10 fois le tour de la bobine.
La technologie d'un moteur brushless est complètement différente et fait donc appel à d'autres règles de nommage :
- 9T est le nombre de tours de fils par pôle sur la cage : c'est très lié au kV et au couple.
- 4300kV est le nombre de tours par volt. Avec un accu de 7,2V le moteur tournera donc à un peu plus de 30.000 tours/minute. Plus le moteur tourne vite plus la vitesse de pointe est élevée.
- comme sur un moteur à charbons, toute augmentation du nombre de tours de fils sur la bobine (par pôle en brushless) influe directement sur le nombre de tours/minute du moteur.
Pour davantage de précision concernant les moteurs à charbons et brushless, je vous invite à lire le RC Tech Guide sur les moteurs dont le lien figure à la fin de cet article 
En résumé, les règles de nommage en brushless sont plus précises, donc plus fiables, car elles tiennent compte de la tension d'alimentation du moteur, ce qui n'est pas le cas avec les moteurs à charbons. Je ne suis toutefois pas rentré dans toutes les subtilités de ces deux technologies de moteurs : d'autres paramètres influent sur le réel niveau de performance d'un moteur, qu'il soit à charbons ou brushless.
Globalement, on peut appliquer une règle de 2 : diviser le nombre de T d'un moteur à charbons pour connaître son équivalent en brushless. Ou encore tenter une correspondance plus précise entre les kV et les T : 3000Kv correspond à un Sport Tuned (qui est un 23T faible ou un bon 25T), 3160kV correspond à un moteur SuperStock 23T (c'est la puissance annoncée du moteur TBLM-01 12T de mon TA-04 TRF et la correspondance annoncée par Tamiya).
Attention : ces explications sont un résumé grossier destiné à vous donner une idée générale et ne doivent en aucun cas être considérées comme une vérité absolue. La technologie brushless est particulièrement complexe et des paramètres très importants comme l'architecture du rotor (en Y ou en delta) ou la très grande influence du contrôleur n'ont volontairement pas été pris en compte pour simplifier les explications. Il s'agit donc de règles générales.
Le moteur EZrun 9T 4300kV
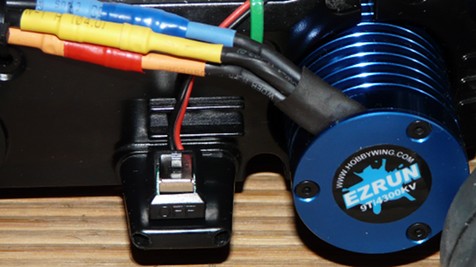
Le contrôleur 60A

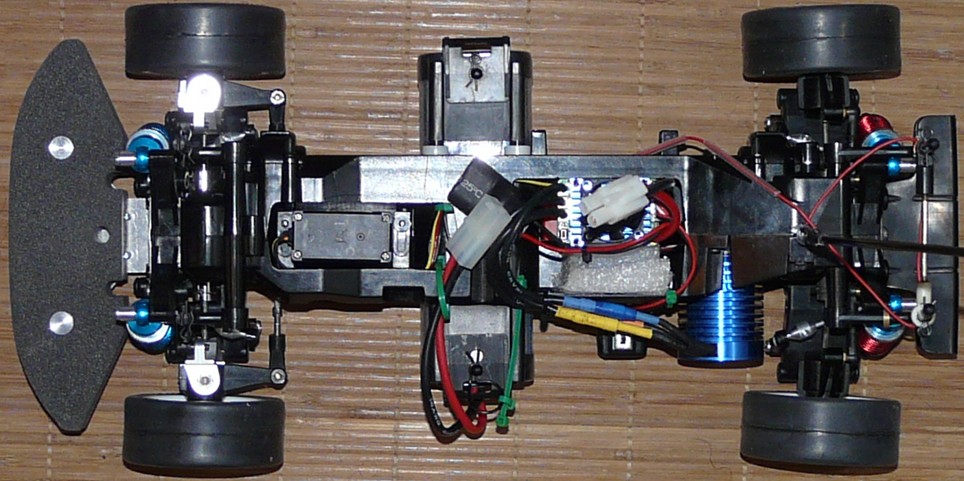
Le morceau de mousse sur la deuxième photo sert uniquement à caler le récepteur au fond de son logement. Il n'est pas collé et peut donc s'ôter facilement pour libérer l'accès au récepteur.
Les 60A dans le nom du contrôleur indiquent l'intensité que l'électronique peut supporter en continu. En pointe, lors de forts appels de courant, le contrôleur peut brièvement supporter jusqu'à 380A. En comparaison, les variateurs électroniques TEU-101BK et 104BK supportent jusqu'à 60A en continu, le 302BK jusqu'à 120A (limite de moteur à 23T). Bien entendu, les accus doivent être en mesure de fournir une telle intensité sous peine de brider la puissance de l'ensemble, d'où la très fréquente utilisation d'accus LiPo avec ce type de configuration brushless. Pour ma part, j'utiliserai des accus Nimh 5000mah.
Programmation du contrôleur Hobbywing
Comme dit précédemment, la technologie brushless est très différente car l'électronique est prépondérante. Dans le cas de l'EZrun, il s'agit d'un moteur dit "sensorless" (sans capteur, par opposition au "sensored" avec capteur) : cela signifie que le moteur n'informe pas le contrôleur sur la position du rotor, ne permettant pas au contrôleur de se synchroniser au mieux pour améliorer la souplesse à faible vitesse et lors des ré-accélérations. Sans cette synchronisation, un phénomène de "cogging" ou à-coups peut se produire : schématiquement, le contrôleur ignorant la position du rotor, il ne parvient pas à envoyer les impulsions de courant sur les bornes adéquates ce qui a pour conséquence que le moteur "balbutie". A noter que ce problème semble être particulièrement affecté par l'utilisation d'un rapport de transmission non adapté (trop court ou trop long) mais également quand l'accu n'est pas capable de délivrer suffisamment de puissance. Pour l'éviter, il faut choisir un rapport plus adapté et utiliser un accu nimh de qualité et de grande capacité (ou passer au LiPo). Sur l'EZrun, il est également possible d'y remédier en inversant 2 des 3 câbles reliant le contrôleur au moteur (n'importe lesquels).
La carte de programmation permet de modifier de nombreux paramètres qui déterminent le comportement du moteur. C'est un accessoire très pratique mais uniquement destiné à simplifier la programmation puisque l'ensemble des opérations peut également s'effectuer directement sur le contrôleur. Et c'est en modifiant ces paramètres que l'on prend conscience de l'importance de cette programmation puisque le moteur peut radicalement changer de caractéristiques.
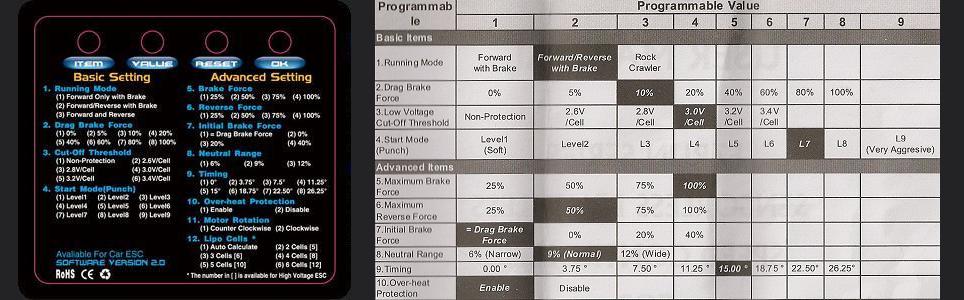
Crédit : Hobbywing
A gauche la carte de programmation (moins l'écran) et à droite la table de réglages avec les valeurs par défaut en italique sur fond noir. J'ai utilisé les réglages suivants :
- Par défaut (marche avant/arrière/frein) : parce que je le vaux bien (et que c'est tout de même plus pratique).
- Option 1 (0%) : il s'agit du frein moteur. Cette notion n'existe pas sur un moteur brushless donc le contrôleur applique une force de freinage pour la simuler.
- Option 1 (pas de protection) : ce n'est utile que pour les LiPo... Il s'agit de la tension d'accu à partir de laquelle le contrôleur passera en mode dégradé pour éviter de perdre le contrôle de la voiture et d’assécher l'accu.
- Level 1 (soft) : par défaut, le réglage tue les pneus au 1er coup de gaz. Sur un buggy 2 roues motrices, c'est le meilleur moyen pour le retourner sur le toit au démarrage (pire qu'un Lunch Box). J'ai donc choisi la valeur la plus faible.
- Option 1 (25%) : c'est la puissance de frein maximum lorsqu'on demande de freiner au maximum avec la radio.
- Par défaut (50%) : c'est la puissance de la marche arrière. Pas besoin de plus car on fait rarement la course en marche arrière.
- Par défaut (option 1) : c'est la puissance de freinage sitôt que la radio passe en mode frein (donc la puissance minimum de freinage). Elle augmente ensuite en fonction de la force de freinage demandée par la radio (donc ici, 25%).
- Par défaut (9%) : c'est la zone de neutre autour du centre de la gachette. Dans cette zone (ici de +/- 9%), le contrôleur considèrera qu'il n'y a aucun ordre envoyé pour les gaz (donc, le contrôleur est en mode frein à moteur). Prévu pour éviter que la voiture ne réagisse au moindre effleurement de la gâchette.
- Option 1 (0%) : c'est un réglage d'avancement de l'alignement du moteur comparable à ce qui existe de manière fixe sur un moteur à charbons. Plus le timing est élevé, plus le moteur offrira de la vitesse de pointe (mais plus il consommera).
- Par défaut (Enable) : il s'agit d'une protection contre la surchauffe du contrôleur. Il est hautement préférable de la laisser activée pour éviter un incendie en cas de problème.
Explications basées sur le travail de Savage-91 de Vintage-RC
Je n'affirme pas que mes réglages sont les meilleurs : ce sont seulement ceux que j'ai décidé d'utiliser. Ces réglages sont très conservateurs car la puissance de cet ensemble est telle que je n'ai tout simplement pas les réflexes pour dompter la bête. Le plus flagrant est le réglage de "punch" (le 4ème) : réglé au maximum, la voiture part comme une balle et les pneus luttent pour s’accrocher aussi bien au sol qu'aux jantes. Honnêtement, je ne vois pas comment la pignonerie pourrait résister plus de quelques départs (et pourtant, elle est extrêmement solide sur le TL-01).
En jouant avec les réglages, on peut passer d'un mode "crawler" (donc lent et tout en puissance) à un mode "patate" qui satellise une voiture dès la ligne de départ. C'est la démonstration de la versatilité de cet ensemble mais également de l'importance cruciale du contrôleur dans la technologie brushless.